项目背景
近年来依据三维激光点云来制作高精度模型已经成为共识,架站式扫描仪也广泛应用于工厂数字化、古建复原等项目。在数字化博物馆项目中,需要在一期工程中做出建筑物的高精度室内外模型,以便于在二期工程中将各种珍贵藏品建模并放置其中。博物馆室内房间较多,遮挡严重,如果使用架站式扫描仪,不仅要在每个房间扫描一站,还要在门框边扫描一站来保证数据的正确拼接。工作效率太低。
我司在本次项目中,使用架站式扫描仪扫描了视野开阔的室外场景;使用移动式手持扫描仪扫描了遮挡严重的室内场景。两种扫描设备的配合,极大的提高了外业采集效率。
TX8技术优势

| 速度快: | 普通外业数据采集3分钟便可完成一站数据采集。 |
| 精度高: | 120米范围内,可达1mm精度。 |
| 距离远: | 对于宽广的区域,TX8扫描范围可达340米扫描测程。 |
| 自动化: | 可以实现软件自动配准处理。 |
| 高兼容: | 所应用的不但可以识别多种数据格式,同时还可导出Dwg、Dxf等数据格式,能够在CAD或其他软件中加载并处理。 |
| 无标靶作业: | 本方案打破了传统的扫描仪作业过程使用标靶的局限,使作业更简单。 |
ZEB-REVO技术优势

- 体积小,重量轻,仅重3.5kg ,手持式 GEO-REVO 可在多种复杂环境下快速部署并进行工作。
- 无需 GPS 与繁琐操控,一键式运行。
- 单人作业,无需传统测量方式两人一组,费时费力。
- 改变传统测量方式,采集所有现场数据,使数据成果有可追溯性。
- 采集数据,可生成多样化成果,一次采集,可适用于多次分析。
- 测量精度高,数据更准确,将现场搬回办公室,对任意位置进行量测。
- 质检更方便,原始数据进行留存,随时作为检验依据。
TRW软件简介

Trimble Realworks是专为当今各种扫描专业应用来设计的、功能强大的办公软件,可从各种三维激光扫描仪导入丰富的数据并将其转换为引人注目的三维成果。
- 配准、可视化、浏览、管理扫描仪点云数据
- 管理、处理和分析大数据集
- 无标靶自动配准,生成报告
- 集成来自Trimble GNSS、全站仪和3D数据
- 导出CAD设计包
- 发布项目数据包供单独浏览、测量、注解
- 5个版本适应不同应用场景
解决方案
外业流程
1.室外部分
本项目室外部分的数据采集使用了Trimble TX8架站式三维激光扫描仪。扫描时采用了无标靶的工作流程,扫描时任意点架站,只需要找到通视条件好的地点就能开始扫描。这一点得益于TX8的配套软件RealWorks强大的点云拼接能力,可以实现人工建筑点云的全自动拼接。

2.室内部分
本项目室内部分的数据采集使用了GeoSLAM ZEB-REVO手持扫描仪,快速采集了四层楼的室内空间。

内业流程
点云处理使用 Trimble RealWorks(以下简称 TRW)。软件可以自动依据建筑物中的平面特征,将室外的 TX8 测站,与室内的 ZEB REVO测站拼接到一起。
使用 TRW 的点云自动提取和自动分类功能,可以快速将室内外点云的噪点去除,获取纯净的点云成果,便于后期的点云成果展示和三维建模。
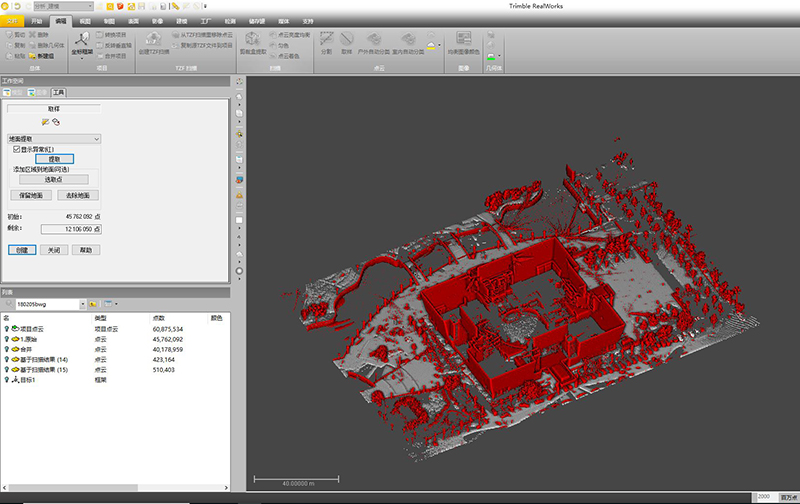 地面提取
地面提取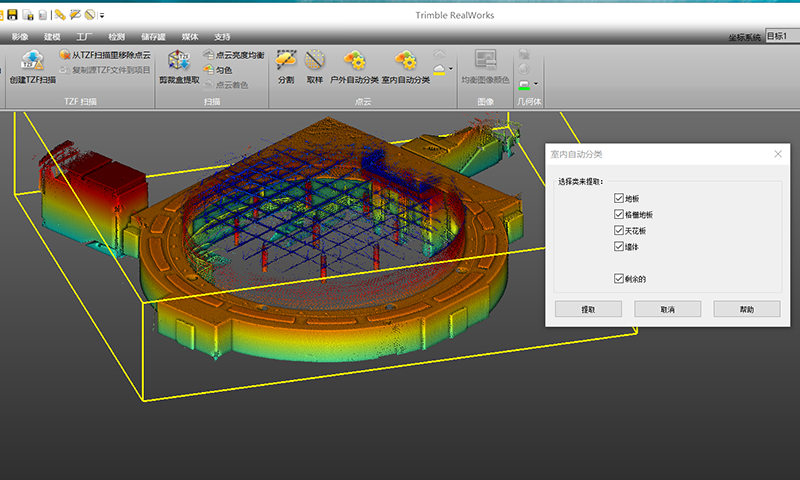 室内自动分类(1)
室内自动分类(1)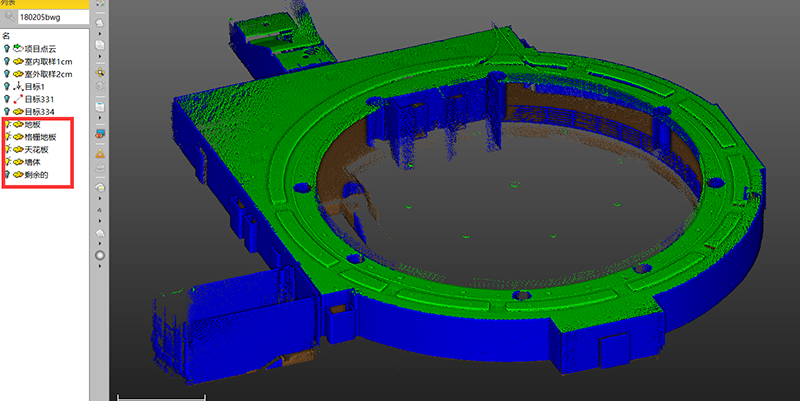 室内自动分类(2)
室内自动分类(2)点云成果展示
点云是一种三维影像,也可以作为数据成果保存和展示。TRW可以将点云以正摄影像图、视频漫游等多媒体形式展示。还能将整个项目发布成网页,供游客访问、测量,甚至下载点云数据进行建模练习。
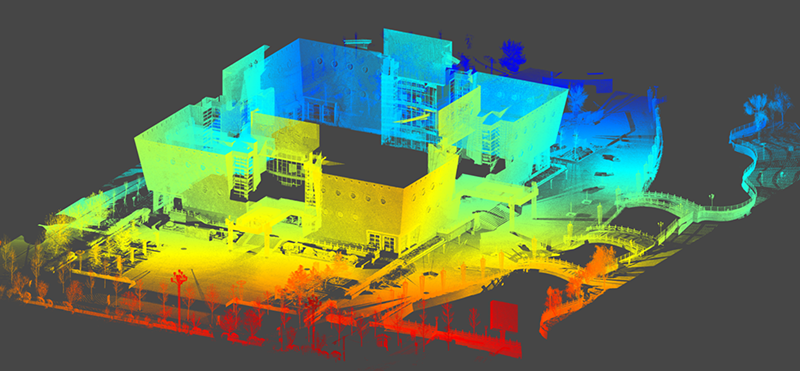 室外点云(1)
室外点云(1) 室外点云(2)
室外点云(2)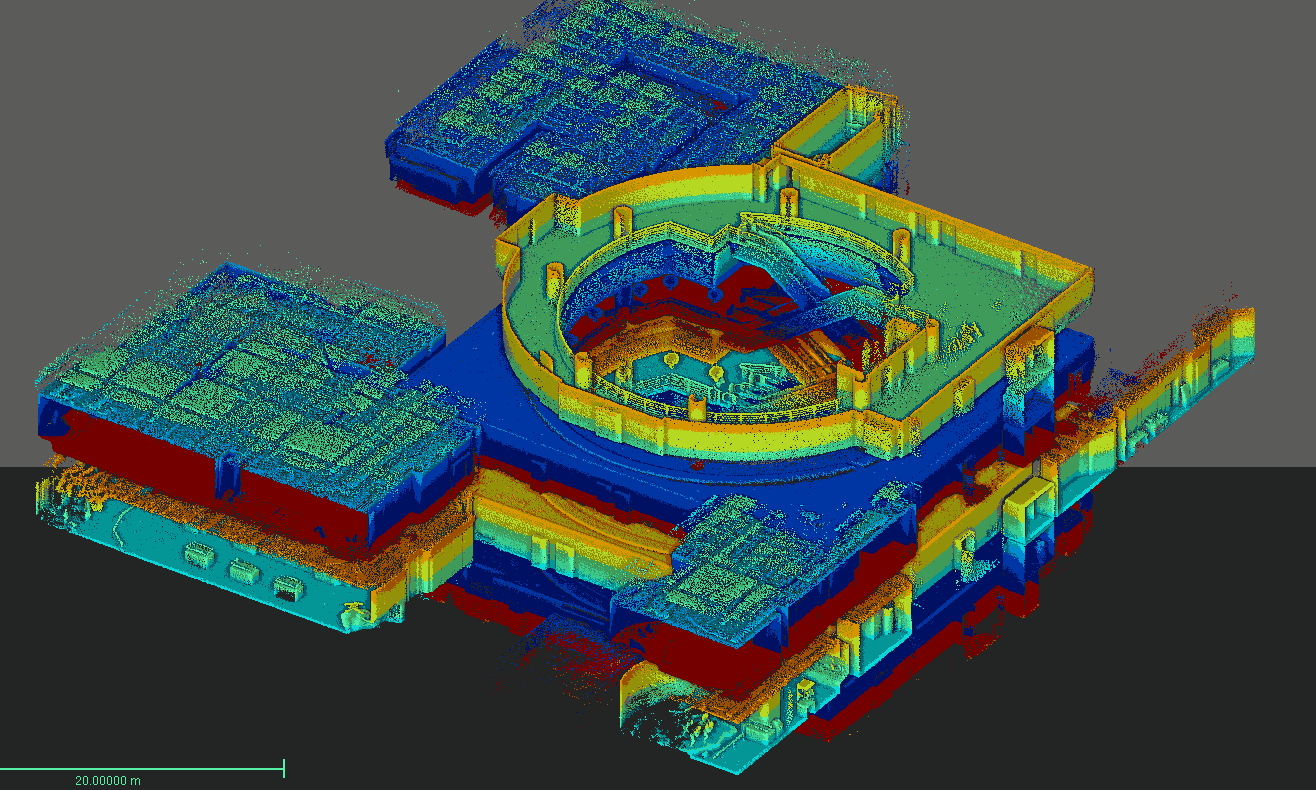 室内点云(1)
室内点云(1)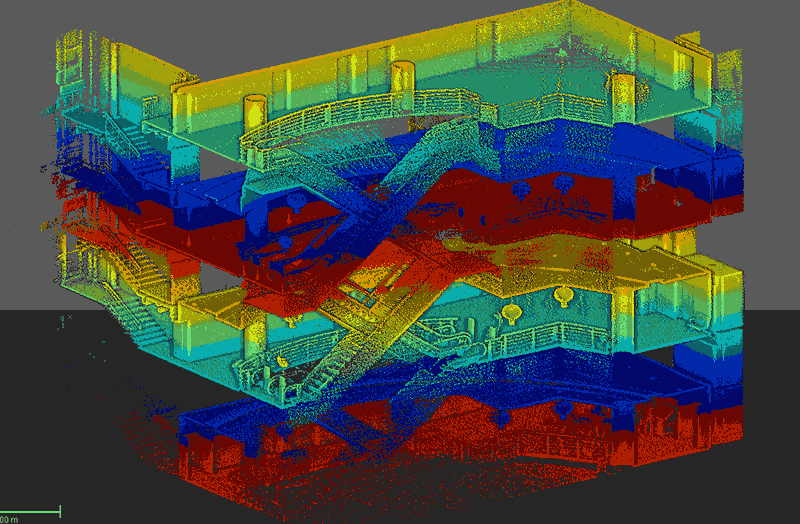 室内点云(2)
室内点云(2)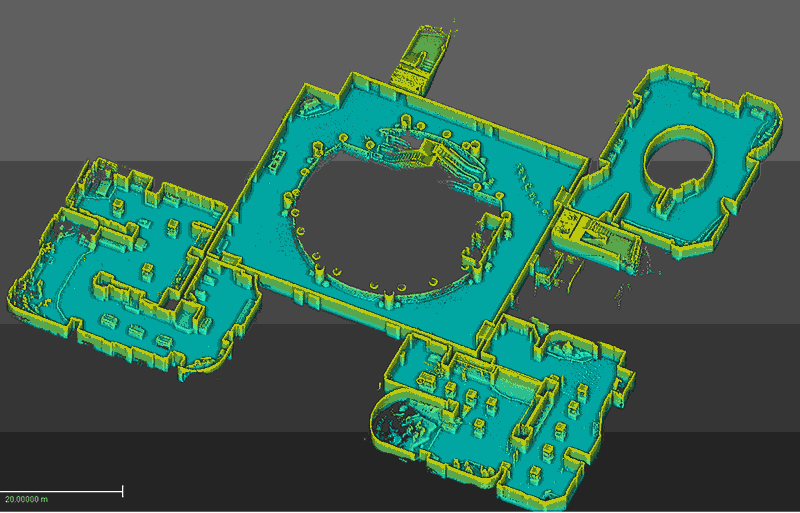 室内点云(3)
室内点云(3)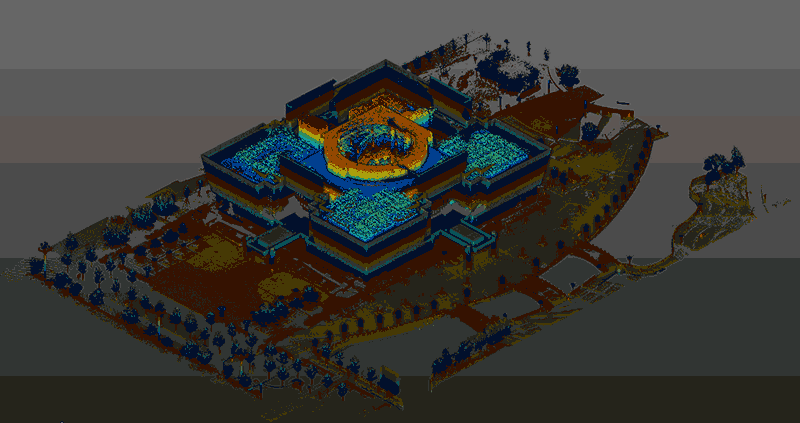 室内外点云一体化
室内外点云一体化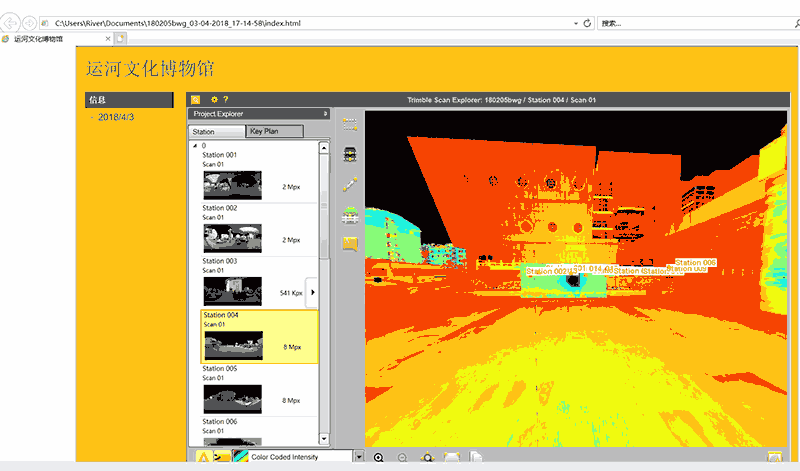 网页发布
网页发布三维建模
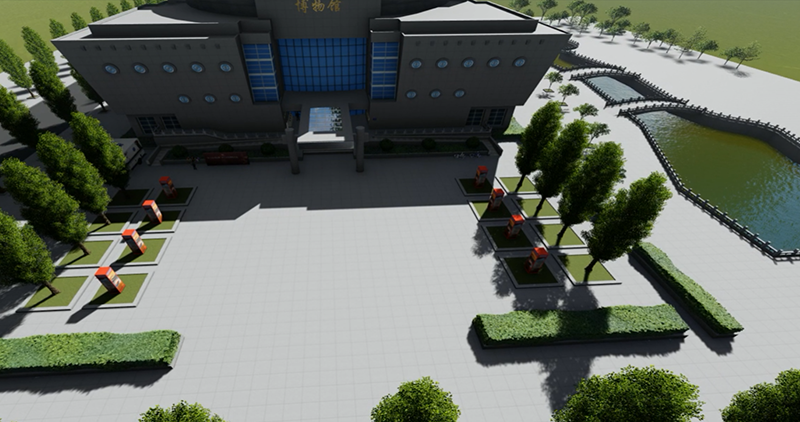
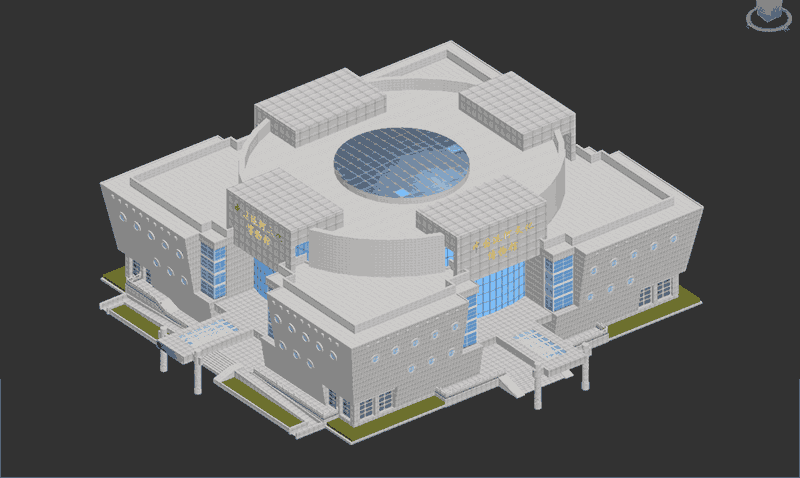 室外模型
室外模型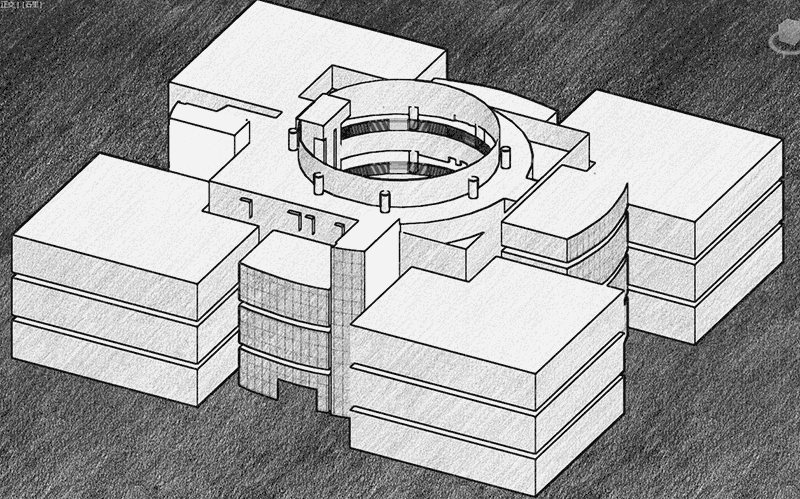 室内模型(1)
室内模型(1)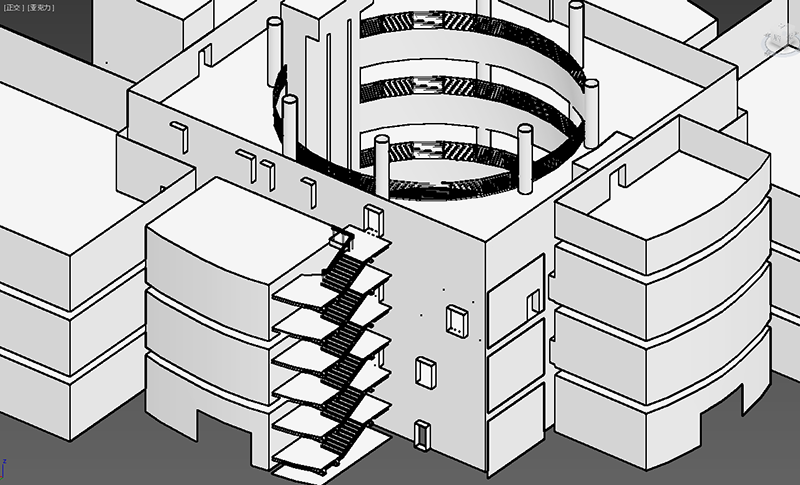 室内模型(2)
室内模型(2)视频制作
 视频展示(1)
视频展示(1)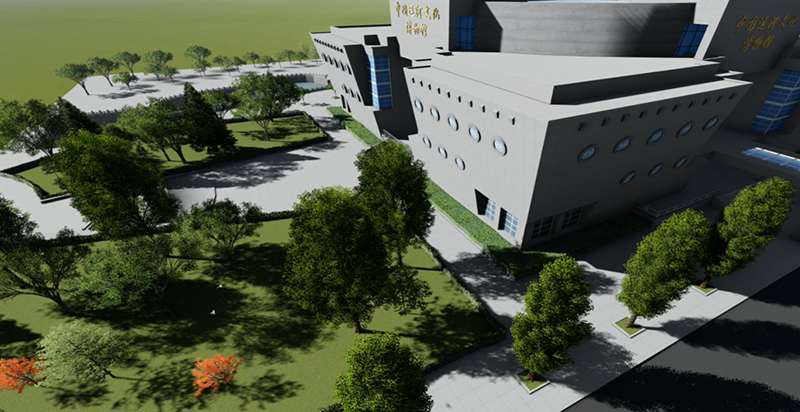 视频展示(2)
视频展示(2)优势总结
1.外业速度快:
城市建筑扫描时,因为视线遮挡的缘故,架站式扫描仪的测站数量往往很多。提高外业效率的方法是减少单个测站所需要的时间。TX8的闪电技术,能够在2分钟内完成一个测站的扫描,并保证足够的数据精度(2mm)和点密度(30m处点间隔为2cm)。而TRW基于平面的全自动拼接,使得我们在外业时只需要有一个测站调平,其他测站任意架站,数据处理阶段可自动调整为水平测站。进一步提高了外业效率。例如本项目的室外扫描,共扫描15站,每站2分钟即可完成。
在室内场景扫描时,我们使用了新一代的GeoSLAM移动式扫描仪,走到哪扫到哪,只需半小时,轻轻松松扫描完了博物馆4层楼的室内空间。扫描速度是架站式扫描仪的8倍。
2.内业处理轻松简单:
Trimble RealWorks(TRW)能够自动将架站式扫描仪和GeoSLAM的点云数据拼接起来;还能智能分类点云,减少删除噪点阶段的工作量,让我们快速得到点云成果,并一键发送到CAD、MAX、SketchUP等制图和建模软件中。
3.成果展示类型丰富:
TRW可以将点云展示成正摄影像和漫游视频等多媒体文件,还能将整个项目发布成网页并进行编辑。